
A linear motor is a transmission device that directly converts electrical energy into linear motion mechanical energy without any intermediate conversion mechanism. It can be regarded as a rotating electrical machine which is cut radially and developed into a plane.
Linear motors are also called linear motors, linear motors, linear motors, and push rod motors. The most common types of linear motors are flat and U-slot, and tubular. The typical composition of the coil is three-phase, and there are Hall elements to realize brushless commutation.
This diagram of a linear motor clearly shows the internal windings of the mover (forcer, rotor). Magnetic iron and track. The mover is formed by pressing the coil with epoxy material. Moreover, the magnetic track is to fix the magnet to the steel.
Linear motors are often simply described as rotary motors flattened out, and work on the same principle. The mover (rotor) is made of epoxy material by compressing the coils together; the magnet rails are the magnets (usually high-energy rare-earth magnets) fixed to the steel. The mover of the motor includes the coil windings, the Hall element circuit board, the thermistor (temperature sensor monitors temperature) and the electronic interface. In a rotating electrical machine, the mover and the stator require a rotating bearing to support the mover to ensure an air gap of the relative moving parts. Likewise, linear motors require linear guides to maintain the position of the mover in the magnetic field generated by the track.
Just as the encoder of the rotary servo motor is installed on the shaft to feedback the position, the linear motor needs a feedback device for the feedback of the linear position - the linear encoder, which can directly measure the position of the load to improve the position accuracy of the load.
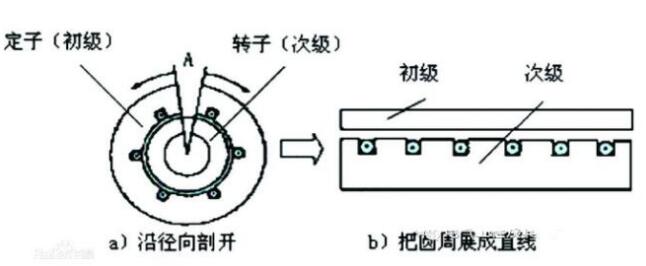
The side derived from the stator is called the primary, and the side derived from the rotor is called the secondary. In practice, the primary and secondary are manufactured to different lengths to ensure that the coupling between the primary and secondary remains unchanged over the required travel range. Linear motors can be either short primary and long secondary, or long primary and short secondary. Taking into account the manufacturing cost and operating cost, short primary and long secondary are generally used at present.
Linear motors work similarly to rotary motors. Take a linear induction motor as an example: when the primary winding is connected to the AC power supply, a traveling wave magnetic field is generated in the air gap, and the secondary is cut by the traveling wave magnetic field, an electromotive force will be induced and a current will be generated. The interaction of the magnetic field produces electromagnetic thrust. If the primary is fixed, the secondary moves in a straight line under the action of thrust; otherwise, the primary moves in a straight line.
The principle of linear motors is not complicated. Suppose a rotating induction motor is cut along the direction of the radius and flattened, which becomes a linear induction motor (Figure). In a linear motor, what is equivalent to the stator of the rotating motor is called the primary; what is equivalent to the rotor of the rotating motor is called the secondary. The primary communicates with each other, and the secondary moves in a straight line along the primary under the action of electromagnetic force. At this time, the primary has to be very long, extending to the position that the movement needs to reach, while the secondary does not need to be that long. In fact, the linear motor can make the primary very long and the secondary very long; it can be fixed in the primary and move in the secondary, or can be fixed in the secondary and move in the primary.
The research on linear motor control technology can basically be divided into three aspects: one is traditional control technology, the other is modern control technology, and the third is intelligent control technology. Traditional control techniques such as PID feedback control and decoupling control have been widely used in AC servo systems. Among them, PID control contains the information in the dynamic control process, has strong robustness, and is the most basic control method in the AC servo motor drive system. In order to improve the control effect, decoupling control and vector control technology are often used. Under the condition that the object model is determined, unchanged and linear, and the operating conditions and operating environment are determined and unchanged, the traditional control technology is simple and effective. However, in high-performance occasions with high-precision micro-feeding, changes in object structure and parameters must be considered. Various nonlinear influences, time-varying and uncertain factors such as changes in the operating environment and environmental disturbances can achieve satisfactory control effects. Therefore, modern control technology has attracted great attention in the research of linear servo motor control. Common control methods are: adaptive control, sliding mode variable structure control, robust control and intelligent control. The main purpose is to combine the existing mature control methods such as fuzzy logic, neural network and PID, H∞ control, and learn from each other to obtain better control performance.
Wall-hung Boiler Pressure Sensor
Shenzhen Ever-smart Sensor Technology Co., LTD , https://www.fluhandy.com