
With the fiery heat of autonomous driving, the laser radar has never been sought after because of its high precision, large amount of information, and no interference from visible light. But we can notice that the current mainstream autonomous driving program does not completely abandon the millimeter wave radar. What is the reason?
First, the introduction
The first thing to be clear is that the radar to be talked about here is a positive radar that emits electromagnetic waves, not a reversing radar that emits mechanical waves.
World War II military fans and historical researchers probably know the origins of radar technology: the first practical radar is used to detect the De Nong, who tried to cross the English Channel in the middle of the night, sitting on the metal shell of the sky. The radar then crushed the glorious moments of the island's well-trained battleship observers in the Pacific night battle, as well as the tragic history of the Jewish anti-radiation missiles being blown into slag in the Bekaa Valley.
The radar was transferred from the war machine to the beginning of the transportation industry with the blood and tears of countless owners - radar speed. Nowadays, the radar has become the assistant of the owner to get rid of the throttle - the main sensor of adaptive cruise, and the protection of the parallel line - blind spot monitoring and parallel auxiliary sensors, and occasionally play the last line of defense to avoid rear-end accidents - automatic emergency Brake sensor.
Second, the structure and principle
At present, the frequency of the on-board radar is mainly divided into the 24 GHz band and the 77 GHz band, and the 77 GHz band represents the future trend: this is the frequency band that the International Telecommunication Union specifically allocates to the vehicle radar. Strictly speaking, the 77 GHz radar belongs to the millimeter wave radar, but in fact the 24 GHz radar is also called the millimeter wave radar.
In engineering practice, there are many ways to implement radar antennas. At present, planar antenna array radars are more common in on-board radars because planar radars do not have rotating mechanical components compared to other implementations, thereby ensuring smaller size and lower cost. The following is a typical example of a flat panel antenna radar to introduce the structure and principle of the vehicle radar.
First of all, there is an intuitive understanding of the vehicle radar:

Look at the internal structure:

One of these is the antenna array, as shown in the following figure:
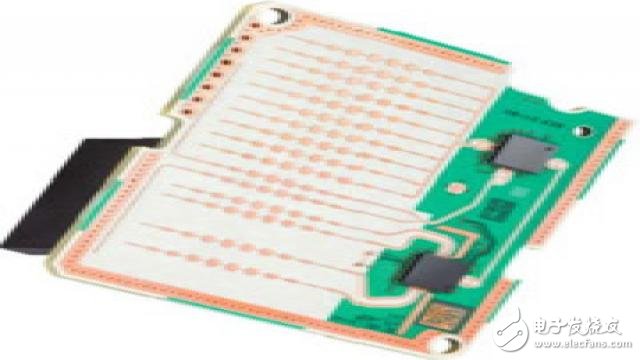
From top to bottom, there are 10 transmit antennas TX1, then 2 transmit antennas TX2, and finally 4 receive antennas RX1 to RX4.
The two sets of transmit antennas are responsible for detecting nearby and distant targets, respectively, and their coverage is as follows:
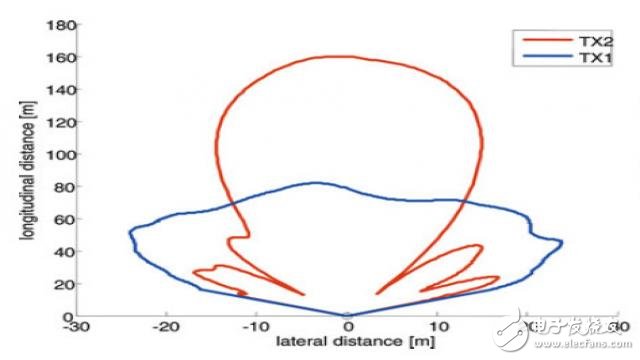
Because the near view angle (FOV) is relatively large, about 90 degrees, so more antennas are needed, and the far angle of view is small, about 20 degrees, so two antennas are enough.
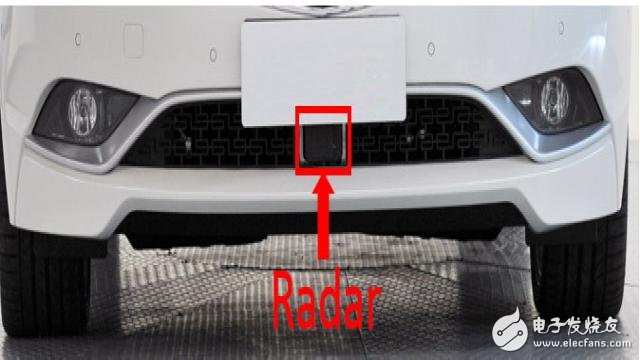
The appearance of the radar on the car is shown below:
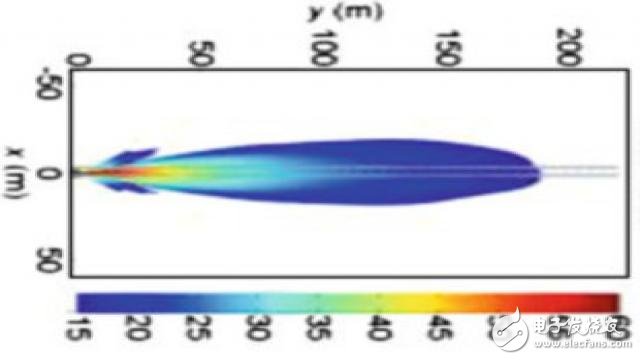
The radar transmits and receives electromagnetic waves through the antenna. The emitted electromagnetic waves are not uniform spherical waves, but are emitted in the form of directional beams and have different intensities in all directions, as shown in the following figure:
The radar mainly measures three parameters of the target: position, velocity and azimuth. The following briefly describes the measurement principle of these three parameters.
Position and speed
The measurement principle of these two parameters is described in the small subject textbook: after the radar wave is emitted by the transmitting antenna and reflected by the target, the radar echo is received by the receiving antenna. By calculating the flight time of the radar wave, multiplying by the speed of light and dividing by 2, the distance between the radar and the target can be obtained.
According to the Doppler effect, the motion velocity of the target relative to the radar can be obtained by calculating the frequency variation of the radar wave returning to the receiving antenna. Simply speaking, the relative velocity is proportional to the frequency variation. When the target is close to the vehicle, the frequency of the echo is increased compared to the transmission frequency, and vice versa.
The specific method of measuring the position and speed varies depending on the modulation method used by the radar. Radar modulation is simply to achieve radar echo recognition and time-of-flight measurements. It is necessary to add markers and time references to the electromagnetic waves emitted by the radar. In the vehicle radar, two methods of amplitude modulation and frequency modulation are mainly used.
Azimuth
The azimuth of the target is calculated by receiving the phase difference of the radar wave reflected by the same target by the parallel receiving antenna. The principle is as shown below:
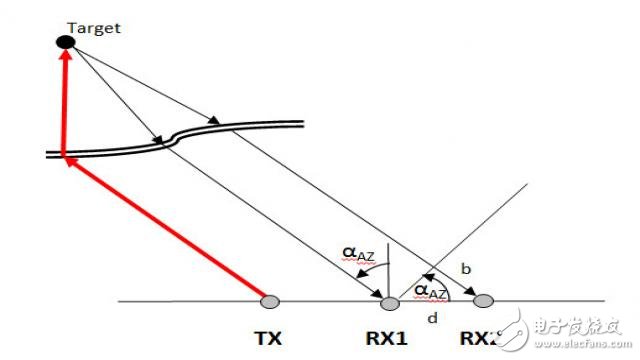
The azimuth angle αAZ can be calculated by a simple trigonometric function by the geometric distance d between the two receiving antennas RX1 and RX2 and the phase difference b of the radar echo received by the two antennas.
Third, application examples
The three most common uses of millimeter-wave radars are:
ACC (Adaptive Cruise)
BSD&LCA (blind spot monitoring and lane change assist)
AEB (automatic emergency braking, usually with camera for data fusion)
As a technology that has been mass-produced for many years, I don't think I need to introduce the specific content of the above functions. Let's talk about something more interesting:
a) Radar data processing flow
The core technology for implementing functions such as ACC is target recognition and tracking. After the receiving antenna receives the radar echo and demodulates, the controller digitally samples the analog signal and performs corresponding filtering. The FFT is then used to transform the signal to the frequency domain. Next, look for specific features in the signal, such as energy peaks in the frequency domain. In this step, we can't get the target we need, we only get the information of the reflection point of the radar wave.
Also, for many high performance radars, multiple reflection points obtained at this time may come from an object, such as a truck that may form 5-10 reflection points. So first of all, the reflection points that are likely to belong to the same object are matched to the same reflection point cluster. Next, by tracking the clusters of individual reflection points, a guess is made about the distribution of the objects.
In the next measurement cycle, for example by Kalman filtering, based on the last object distribution, predict the possible object distribution in the measurement cycle, and then try to match the currently obtained reflection point cluster with the prediction result, for example by comparing the position of the object. And speed and other parameters. When the cluster of reflection points and the object information obtained by the previous measurement cycle are successfully matched, the "track" of the object is obtained, and the credibility of the object is increased, and vice versa, the credibility is decreased. Only when the credibility of an object exceeds a certain threshold will the object become the target of our concern and enter the so-called target list.
b) Two small questions about radar
Can the radar detect a stationary target?
Many early ACC systems do not react to stationary objects, that is, if there is a stationary object in front, such as a vehicle parked in front of the detection range, the ACC does not target the vehicle and does not decelerate. request. So some people think that the radar can't detect stationary objects, which is actually a misunderstanding.
From the previous description, we can see that the radar detection capability is only related to the radar wave reflection characteristics of the object, and does not involve any motion characteristics. Therefore, as long as the radar reflection cross section of the object is large enough, there is no undetectable problem. Early ACC did not respond to stationary objects mainly due to target classification. Due to the low angular resolution of the early radars, the resolution in the height direction and the lateral direction is low, and it is not possible to distinguish between objects that can be crossed, such as manhole covers, or objects that can pass through below, such as street signs.
Therefore, in order to avoid ACC malfunction, such as braking on the highway due to the street sign, it is designed not to react to the stationary object that is maintained from the beginning of the detection, because it is impossible to judge whether the object is an infrastructure or a traffic participant. On the other hand, even in the early ACC system, since the radar preserved the historical information of the target, if the detected vehicle braked from running to stop, the system can still divide the object into traffic participants, thereby implementing the system. move.
Compared to the advantages of lidar?
With the fiery heat of autonomous driving, the laser radar has never been sought after because of its high precision, large amount of information, and no interference from visible light. But we can notice that the current mainstream autonomous driving program does not completely abandon the millimeter wave radar. What is the reason?
The first is the weather that everyone knows. The wavelength of the laser is much smaller than the millimeter wave radar (nm vs mm), so the smog causes the laser radar to fail. For the same reason, the detection range of the millimeter wave radar can easily exceed 200 meters, and the current performance of the laser radar generally does not exceed 150 meters, so the millimeter wave radar can do better for the situation of highway follow-up.
Secondly, millimeter-wave radar is cheap. As a mature product, the current price of millimeter-wave radar is about 1.5 thousand, and the price of laser radar is still calculated in units of 10,000. And because the amount of data acquired by lidar far exceeds the millimeter-wave radar, higher performance processors are needed to process the data, and higher performance processors also mean higher prices. So for engineers, millimeter-wave radar is still the best choice in simple scenarios.
V2G Charger, V2G Bidirectional Charger
V2G Charger
Shenzhen Hongjiali New Energy Co., Ltd. , https://www.hjlcharger.com